|
pixbuster
Amministratore

 fondatore
fondatore

Veneto

12371 Messaggi |
 Inserito il - 04/02/2017 : 23:41:48 Inserito il - 04/02/2017 : 23:41:48


|
FUNZIONAMENTO DELLE BICICLETTE A PEDALATA ASSISTITA (BiPA)
La grandissima maggioranza dei modelli si spartisce fra due soluzioni tecniche per la posizione del motore e due per la gestione della potenza fornita dal motore
Le considerazioni sono necessariamente a carattere generale: ogni modello richiederebbe una valutazione specifica
-------------------------------------------------
POSIZIONE DEL MOTORE
Il motore può essere ubicato vicino al movimento centrale, oppure nellasse di una delle due ruote
Nel primo caso si definisce motore centrale (o mid motor) e nel secondo viene identificato come motore a mozzo (o hub motor)
Per un maggior approfondimento sui tipi di motorizzazione ed il loro cinematismo vedi "cinematismi delle bici elettriche"
MOTORE CENTRALE

Può agire sulla catena tramite un pignone dedicato che agisce sulla catena, oppure tramite una catena secondaria che azioni la corona, ma attualmente la soluzione di gran lunga più diffusa è quella di un gruppo motore che incorpori anche il movimento centrale (Bosch, Yamaha, Sunstar, Shimano, Bafang ...)
Il vantaggio più grande di questa soluzione cinematica è la possibilità da parte del motore di sfruttare il cambio di marcia della bici per mantenere il regime di rotazione del motore nella zona di rendimento più favorevole in tutte le condizioni di marcia
Infatti, quando la velocità scende, ad esempio perchè si percorre una salita, il motore rallenterebbe e si porterebbe in zone di basso rendimento elettrico; ma è sufficiente scalare marcia per riportare i giri nella zona ottimale
Disponendo di rapporti sufficientemente corti, è possibile affrontare pendenze anche molto elevate (sopra al 15%, ma si può arrivare anche al 30%) con un rendimento elettrico ancora buono
Si sottolinea la necessità di disporre di rapporti molto corti per poter affrontare salite molto ripide
Altri vantaggi di questa soluzione sono:
la possibilità di adottare qualsiasi tipo di cambio anche di elevata qualità e anche cambi interni al mozzo
la migliore collocazione del peso del motore che risulta molto in basso e in posizione centrata, favorendo labbassamento del baricentro e la maneggevolezza; inoltre, le ruote non vengono stressate dalla presenza della motorizzazione
Cè un vantaggio che è però fuori codice : allungando i rapporti del cambio, si può far marciare la bipa a velocità anche elevate, limitate solo dalla potenza erogabile dal motore che, nella marcia in piano, può portare facilmente a raggiungere i 35-40km/h ; le centraline elettroniche sono però programmate per interrompere lassistenza sopra ai 27km/h massima velocità consentita dalle leggi europee e per ottenere tali prestazioni occorre ricorrere a sistemi che ne ingannino i sensori (e che sono ovviamente proibite nella circolazione su strade aperte al pubblico)
Ci sono, come per ogni soluzione tecnica, lati negativi:
Il rendimento meccanico è più basso rispetto ai motori a mozzo: difatti i giri del motore vengono ridotti alla velocità di rotazione dei pedali (80-100 giri/min) e questo richiede ladozione di una coppia di ingranaggi in più rispetto agli hub La potenza del motore poi transita dalla corona, dalla catena e dal pacco pignoni abbassando ulteriormente il rendimento
Da prove eseguite su diversi sistemi si è evidenziata una perdita di rendimento totale del 10-15% che, in pianura, significa unuguale diminuzione dellautonomia
In salita, durante le scalata di marcia, il motore deve cessare la sua assistenza per non rovinare la catena e gli ingranaggi; a tal fine ci sono spesso dei sensori che staccano automaticamente lalimentazione al motore quando si preme la levetta del cambio; se non sono presenti bisogna alleggerire la pedalata in anticipo e per più tempo, con una immediata perdita di velocità
Questa motorizzazione privilegia cadenze di pedalata sostenute perchè, essendo tale cadenza legata alla velocità di rotazione del motore, pedalando via via più lentamente si peggiora nettamente il rendimento elettrico del motore; chi è abituato a cadenze tranquille deve tener conto di tale peggioramento che si riflette proporzionalmente sullautonomia
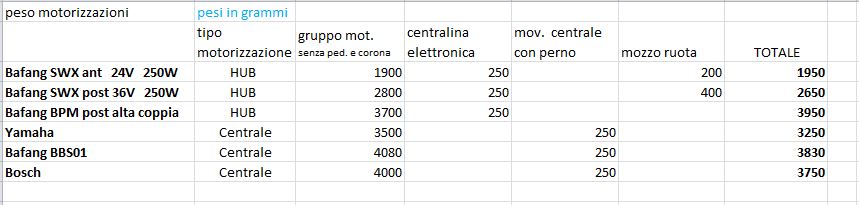
Il peso del gruppo motore è generalmente più elevato proprio per la presenza dellulteriore treno di ingranaggi che deve essere di grossa dimensione per sopportare le coppie elevate dovute al basso numero di giri dei pedali
Questa è una tabellina indicativa dei pesi di alcuni tipi di motorizzazione attualmente diffuse
Con la precisazione che sono valori orientativi perchè dipendono dai componenti meccanici usati (ruote, raggi, pedivelle ecc.) e da quelli corrispondenti che vanno a sostituire
Il prezzo di questa motorizzazione, più complessa, è più elevato
Il montaggio richiede un telaio apposito privo dellalloggiamento del movimento centrale che è già compreso nel gruppo motore e di un alloggiamento specifico per ogni modello di motorizzazione (esclusi alcuni come il Bafang BBS01 e il TSDZ2 che si agganciano nella sede del movimento centrale già esistente)
La riparazione in caso di guasti è meno agevole e generalmente bisogna portare lintera bipa in una officina autorizzata
Non è generalmente possibile montare corone multiple; ma questa situazione si sta evolvendo: alcune motorizzazioni lo consentono già e si stanno diffondendo i pacchi pignone con escursione larghissima che rendono superflua ladozione di corone multiple (come la 11x1 Shimano)
MOTORE A MOZZO

Il vantaggio principale di questo tipo di motorizzazione è lelevato rendimento nella marcia in piano o su pendenze leggere: il motore richiede una sola coppia di ingranaggi e non ha ulteriori perdite perchè agisce direttamente sulla ruota
E anche una soluzione più economica e che non richiede telai speciali, ma si può applicare anche a biciclette muscolari qualsiasi Perciò consente la trasformazione in elettrica di una bici già in nostro possesso
(Per questa trasformazione occorrono alcune attenzioni e si rimanda alla sezione Kit per valutarle)
La frequenza di pedalata non influisce sul cinematismo del motore perciò è possibile sceglierla come più ci aggrada : lenta o veloce
Durante le scalate di marcia in salita, il motore non cessa la sua assistenza anzi tende ad aumentare la sua spinta quando alleggeriamo la pedalata al momento del cambio di marcia, evitando perdite di velocità nel momento più critico
Il motore non affatica la trasmissione (pedali, corona, catena e pignoni) e consente ladozione di doppie o triple corone anteriori
E generalmente più leggero della soluzione a motore centrale (vedi tabella più sopra)
Ma ci sono i lati negativi:
Quando la velocità scende percorrendo una salita, il rendimento elettrico peggiora vistosamente (è una motorizzazione monomarcia)
Con questa motorizzazione pendenze superiori al 10-15% (dipende dal tipo di motore) implicano elevati consumi di corrente che vanificano il vantaggio del maggior rendimento meccanico Sopra al 18-20% generalmente queste motorizzazioni non riescono nemmeno a salire (a meno di sforzi elevati da parte del ciclista)
La ruota motrice è appesantita dal motore e sullo sconnesso si avverte nettamente; si possono avere problemi di rottura dei raggi (principalmente per la maggior inclinazione dei raggi dovuta al diametro maggiore rispetto ad un mozzo tradizionale)
Lo smontaggio della ruota non è diverso da quello di una ruota muscolare, ma è meno agevole per il peso più elevato
Se il motore hub è montato anteriormente, cè un leggero appesantimento dello sterzo (generalmente poco avvertibile) e, con i motori a coppia elevata, si possono avere slittamenti della ruota
Se la motorizzazione è posteriore, non è possibile adottare i cambi a mozzo (che consentono la cambiata da fermo assai comoda nelluso cittadino)
La maggioranza dei modelli utilizza pacchi pignoni a vite e solo alcuni consentono luso di quelli a cassetta, perciò è normalmente difficile reperire eventuali pacchi pignoni diversi da quello originale
-------------------------------------------------
GESTIONE DELLA POTENZA FORNITA DAL MOTORE
I due sistemi quasi universalmente utilizzati sono il controllo dello sforzo applicato ai pedali oppure il controllo della rotazione dei pedali stessi
Hanno caratteristiche pratiche differenti: non ci sono vantaggi e svantaggi oggettivi, ma solo due filosofie diverse nel regolare la potenza del motore che portano a preferire uno o laltro dei sistemi
Tipicamente i sistemi di controllo della rotazione pedali sono implementati su bipa con motore a mozzo mentre quelli a controllo dello sforzo sono integrati nei gruppi motore centrali
In commercio è possibile però trovare tutte le combinazioni di queste due coppie di soluzioni
CONTROLLO DELLO SFORZO APPLICATO AI PEDALI
Questo sistema è generalmente accoppiato ai motori centrali dove i sensori relativi sono compresi nella stessa scatola del gruppo motore
Per funzionare utilizza un torsiometro generalmente montato nellasse del movimento centrale; meno frequente è lutilizzo di un sensore di deformazione montato al posto di uno dei forcellini posteriori
( vedi Elettronica delle biciclette a pedalata assistita, voce in fase di realizzazione)
La pressione sui pedali viene trasformata in un segnale elettrico che viene inviato alla centralina elettronica
Normalmente è presente anche un sensore di velocità di marcia e un ulteriore sensore per controllare la presenza di rotazione dei pedali
Fa parte del sistema anche un pannellino con pulsanti per cambiare il livello di assistenza fornito dal motore
Esercitando una spinta sui pedali, la centralina invia al motore una potenza proporzionale alla spinta Significa che se spingo poco il motore eroga poca potenza e che se spingo con più vigore il motore copia questo aumento
Leffetto è paragonabile allavere muscoli più potenti (molto più potenti !)
Con i pulsanti sul pannellino posso modificare la proporzionalità fra spinta muscolare e spinta del motore; ovvero posso regolare quanto potenti diventano i miei muscoli
Il rapporto fra sforzo muscolare e potenza erogata dal motore può variare indicativamente fra il 50% e il 250-300%
Significa che se ci metto 100 watt muscolari, il motore ce ne mette da 50 a 300
La proporzionalità fra spinta muscolare e potenza elettrica non è però completa: sotto ai 10-15 kg di spinta sui pedali il sistema non si attiva (è poco più del peso della gamba); sopra il 40 kg di spinta muscolare il sistema si satura e la spinta del motore non cresce più
Anche il rapporto potenza muscolare/potenza elettrica non è costante ma lo è solo in determinate zone di utilizzo
La proporzionalità fra spinta muscolare e spinta del motore è oggetto di continui affinamenti da parte dei Progettisti e le centraline utilizzano algoritmi sempre più sofisticati per realizzarla nel modo più utile e trasparente per il ciclista
Questo sistema ha come vantaggio principale la naturalezza nella regolazione dellaiuto fornito dal motore e limmediatezza istintiva della sua variazione: per avere più spinta spingo di più, per averne meno spingo di meno e se cesso la spinta il motore immediatamente si spegne; ovvero: per variare laiuto del motore modulo la mia spinta, esattamente come si fa con una bici muscolare
La conseguente caratteristica (da alcuni considerata un difetto, da altri un pregio) è che occorre sempre mettere un certo sforzo sui pedali per poter viaggiare
Con le bipa finora provate, per viaggiare a 25km/h occorre una potenza muscolare di 95-105 W
In salita, per avere lerogazione massima del motore, si devono applicare non meno di 160W sui pedali
Questo sistema è più allenante perchè costringe ad un certo sforzo muscolare, ma può essere fastidioso per chi utilizza la bipa come mezzo di trasporto e non vuole arrivare sudato a destinazione
Dove questo sistema risulta molto utile è nelluso fuoristradistico per la sua immediata ed istintiva regolazione
Altrettanto con questo sistema è possibile allungare fortemente lautonomia perchè consente valori di assistenza molto bassi (abbiamo visto che applicando 70W il motore ne potrebbe erogare soltanto 50)
Ovvero: se si è sportivi, soprattutto in piano si può selezionare un aiuto minimo del motore e procedere quasi solo a muscoli, ottenendo valori di autonomia assai lunghi (ma con maggiore stanchezza fisica) e utilizzare la piena assistenza del motore solo nei tratti in salita
Con questo sistema, se si stanno usando valori di assistenza bassi, non è generalmente possibile far erogare al motore la sua potenza massima anche spingendo al massimo sui pedali; per ottenerla si deve agire sui pulsantini e passare a valori di assistenza più alti (per cui se ne deve tener conto durante la marcia nel traffico)
CONTROLLO DELLA ROTAZIONE DEI PEDALI
Questo sistema utilizza un sensore che rileva la rotazione dei pedali e, a volte, un ulteriore sensore per misurare la velocità di marcia
E sempre presente un pannellino con pulsanti oppure un manettino rotante
Molto spesso i freni sono dotati di sensori per interrompere lassistenza elettrica quando vengono azionati
Molto spesso tale sistema è accoppiato a motori a mozzo; esistono tuttavia motorizzazioni centrali che lo utilizzano (ad esempio il Bafang BBS01)
In presenza di rotazione dei pedali, viene inviato alla centralina un consenso alla marcia del motore Arrestando la pedalata o azionando un freno, tale consenso si interrompe e l'assistenza elettrica cessa
La modulazione dellassistenza elettrica avviene selezionando con i pulsanti (o il manettino) il valore preferito
Essendo presente solo un sensore di rotazione dei pedali, la centralina non può conoscere lammontare della spinta muscolare
Come conseguenza si ha che il motore eroga la sua potenza anche se semplicemente faccio girare i pedali senza applicare alcuno sforzo
In alcuni sistemi è addirittura possibile ottenere la spinta del motore facendo soltanto ruotare lentamente i pedali (qui la chiamiamo pedalata simbolica )
Con questo sistema, ad ogni valore di assistenza selezionato corrisponde una certa velocità a ruota sollevata;
anche su strada cè una proporzionalità fra il valore impostato e la velocità, ma tale velocità è influenzata dalla quantità di sforzo muscolare applicato ai pedali
In pratica significa che si può viaggiare in piano ad una certa velocità senza applicare sforzo ai pedali; aumentando lo sforzo tale velocità cresce fino al valore velocità a ruota sollevata; man mano che tale velocità aumenta, diminuisce la potenza erogata dal motore fino ad annullarsi del tutto
Facciamo un esempio pratico:
Imposto il valore di assistenza intermedio con i pulsanti (o manettino)
Se aziono lentamente i pedali a ruota sollevata, ottengo una velocità di 22km/h
Ora mi metto su strada e continuo a non applicare spinta ai pedali, ma li tengo in semplice rotazione; la velocità si porterà fino a 19km/h
Se aumento il mio sforzo muscolare, tale velocità crescerà via via fino ai 22km/h con contemporanea diminuzione dellassistenza del motore; raggiunti i 22km/h il motore non fornirà più assistenza e viaggerò a sole spese dei muscoli; è perciò possibile scegliere il valore di sforzo desiderato fra niente e tutto muscoli e questo è il principale vantaggio di tale sistema
Tipicamente consente di marciare a velocità da codice senza sudare ne destate col caldo ne dinverno sotto gli abiti pesanti
Se aumento il valore di assistenza (con i pulsanti o con un manettino), cresce la velocità massima fino allintervento del limitatore elettronico o fino al limite della potenza erogabile dal motore
Più livelli di assistenza sono disponibili (si va da 3 a 9) più è fine la regolazione
Paragono questo sistema allavere sempre la strada in leggera discesa: posso lasciarmi trasportare oppure spingere sui pedali per avere una maggiore velocità
La regolazione dell'assistenza si può paragonare ad una variazione di questa ideale pendenza in discesa
Abbiamo parlato di manettino per la regolazione del valore di assistenza: è equivalente allavere infiniti livelli selezionabili molto rapidamente ; cioè si può immediatamente cambiare il livello di assistenza oppure passare a quello massimo oppure ancora far cessare completamente lassistenza (ad esempio nei falsopiani in discesa) senza dover utilizzare i pulsanti
La sua legalità è assicurata quando non consente l'avvio e la marcia del motore in assenza della pedalata
PARTENZA DA FERMO
Negli anni passati i sistemi a controllo della rotazione dei pedali richiedevano in partenza di compiere un sensibile tratto di strada prima che il motore venisse alimentato;
al contrario i sistemi a motore centrale (tipicamente il Panasonic) avviavano il motore già a ruota ferma
Con landare del tempo tale situazione si è livellata con ladozione di sensori di rotazione dei pedali molto più sensibili e ora bastano anche solo pochi centimetri di spostamento della bipa per avere lavvio del motore (in pratica basta il tratto in cui spinge il piede a terra)
Ladozione di un pulsante chiamato soft-start, che consente di alimentare il motore anche in assenza di movimento dei pedali fino a 6km/h , ha del tutto annullato le differenze fra i due sistemi
(per completezza: le motorizzazioni centrali Bosch richiedono anchesse un piccolo avanzamento della bipa per consentire lavvio del motore)
Ogni modello di bicicletta elettrica ha una risposta allavvio specifica perciò non è possibile generalizzare e si rimanda ai test specifici
|
Pix su Frisbee Atlas, su pieghevole 20" Kawasaki con kit Bafang centrale e su Cargo muscolare "artigianale"
|
|
 ]
]

